Go to the source code of this file.
Definition at line 1 of file brake.f.
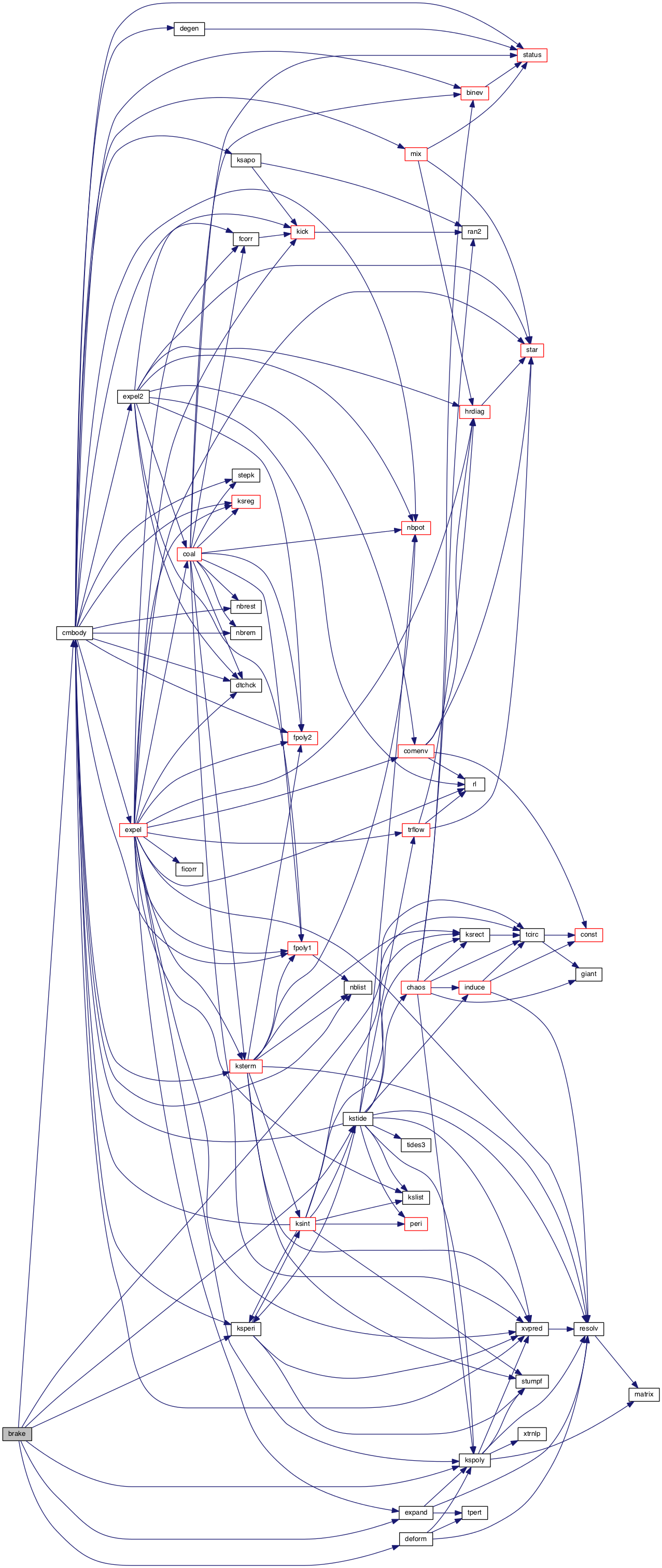
References cmbody(), deform(), expand(), ksperi(), kspoly(), kstide(), and tcirc().
Referenced by mdot().
 1.8.2
1.8.2